Template:DCBLDCMotor DriveMode
The Drive Mode allows you to configure the deceleration of your motor. There are two modes to choose from:
- Coast Mode (default behavior)
- Forced Mode
Coast Mode
Coast Mode is the default behavior. In this mode, your motor will coast (freewheel) while decelerating. This is similar to the deceleration experienced when releasing the gas pedal in a car.
Other Considerations
When using Coast Mode your Current Limit will scale based on your motor's Velocity.
The graph below shows the impact of different Velocity values on the Active Current Limit for a controller with a minimum Current Limit of 5A.
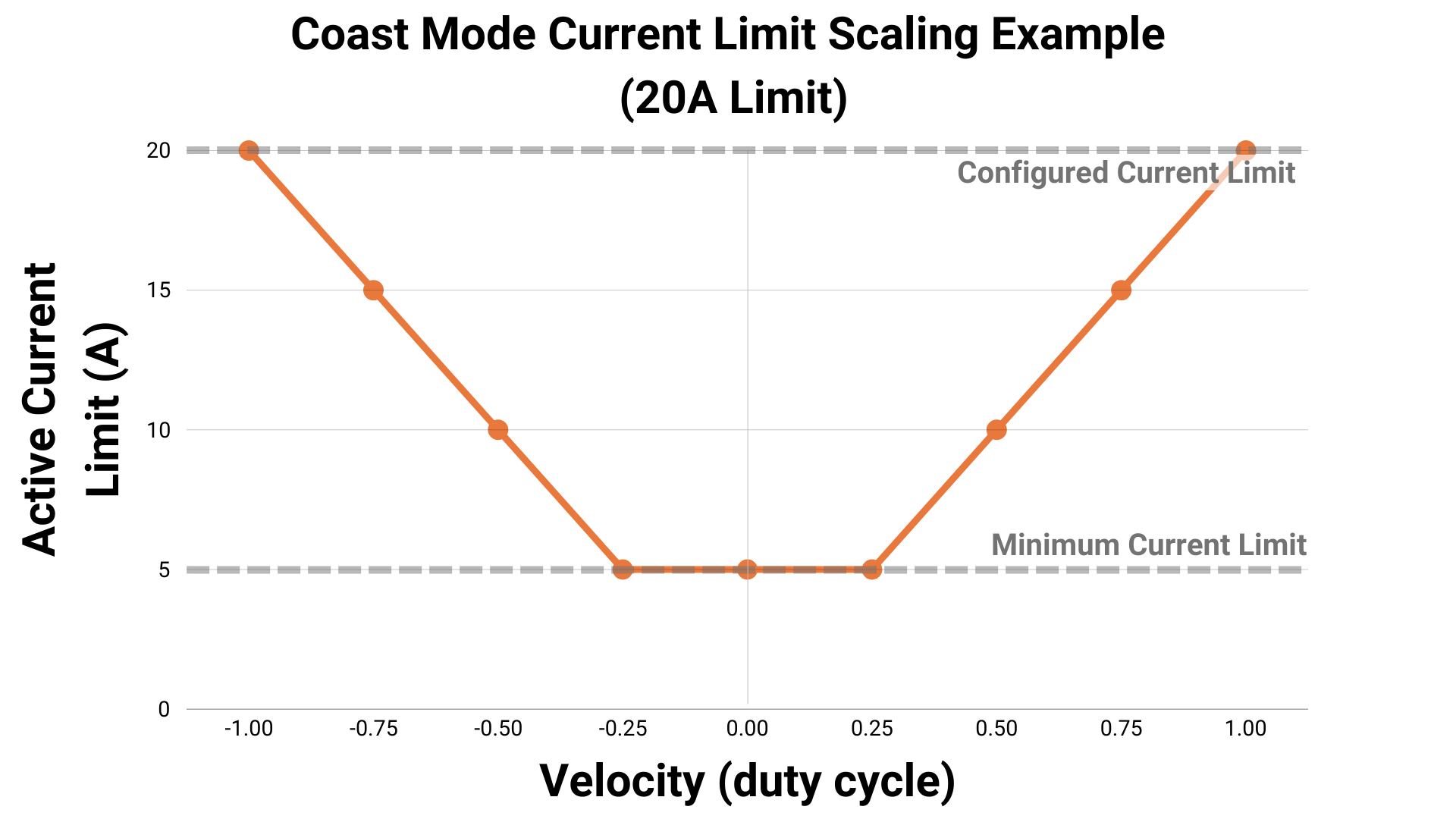
Notes:
- The minimum Current Limit is 5A.
- The Configured Current Limit may refer to a Surge Current Limit if it is set.
Forced Mode
In Forced Mode your motor will aggressively slow down, often regenerating power in the process.
Other Considerations
When using your Phidget in this mode, you will have full access to your Current Limit.
The table below shows the impact of different Velocity values on the Current Limit for a controller with a minimum Current Limit of 5A.
| Drive Mode | Velocity (duty cycle) | Current Limit (A) | Active Current Limit (A) |
|---|---|---|---|
| FORCED | 1.0 | 20 | 20 |
| FORCED | 0.5 | 20 | 20 |
| FORCED | 0.1 | 20 | 20 |
| FORCED | -0.5 | 20 | 20 |